Nazadnje pregledano 30. maja 2026
Vrste neuravnoteženosti: statična, momentna in dinamična — kaj je razlika?
Razumevanje vrste neuravnoteženosti je ključno za pravilno uravnoteženje. Določa, koliko korekcijskih ravnin boste potrebovali (eno ali dve), katero metodo uravnoteženja izbrati in kakšen rezultat lahko pričakujete.
Poskus odprave dinamične neuravnoteženosti z metodami uravnoteženja v eni ravnini je pogosta napaka, ki vodi v izgubo časa in nezadovoljive rezultate. V tem članku podrobno obravnavamo vsako vrsto neuravnoteženosti, se naučimo razlikovati med njimi in določiti najboljšo strategijo za njihovo odpravo.
V tem članku boste izvedeli:
- fizikalno naravo vsake vrste neuravnoteženosti,
- kako prepoznati vrsto neuravnoteženosti iz geometrije rotorja,
- koliko korekcijskih ravnin je potrebnih,
- praktične primere za različno opremo.
Statična neuravnoteženost (ena ravnina)
Fizika
Statična neuravnoteženost nastopi, ko se glavna središčna vztrajnostna os rotorja vzporedno zamakne glede na os vrtenja. Preprosteje povedano: na rotorju je ena sama „težka točka“, ki premakne težišče.
Izračun sile: Neuravnoteženost rotorja 1 gram pri polmeru 100 mm in 3.000 vrt/min ustvari centrifugalno silo skoraj 10 N — kar ustreza udarcu kladiva 50-krat na sekundo. Že majhna neuravnoteženost povzroči ogromno ciklično obremenitev ležajev.
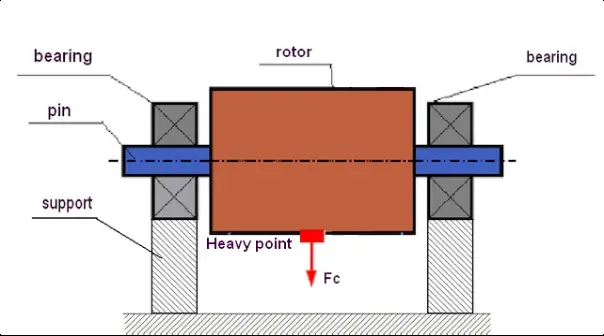
Sl. 1. Statična neuravnoteženost: težka točka se zaradi gravitacije vedno zavrti na dno. V mirovanju se rotor ustali v določenem položaju.
Kako se kaže
Posebnost statične neuravnoteženosti je, da je razvidna že v mirovanju. Če tak rotor položimo na vodoravna nožasta opornika ali ga obesimo na os z minimalnim trenjem, ga bo gravitacija vedno zasukala tako, da se ustavi s „težko točko“ na dnu.
Prav to je načelo preprostega statičnega uravnoteženja „na nožastih opornikih“ — metode, znane že iz 19. stoletja.
Za katere rotorje je značilna
Statična neuravnoteženost prevladuje pri ozkih, ploščatih rotorjih, kjer je razmerje med dolžino in premerom (L/D) majhno — manj kot 0,25–0,5. Primeri:
- brusilne plošče,
- tanke jermenice,
- ozka lopatična kolesa ventilatorjev,
- krožne žage,
- tanka vztrajnostna kolesa.
Metoda korekcije
Odpravi se z namestitvijo ene korekcijske uteži v eni korekcijski ravnini, diametralno nasproti „težki točki“ (180° stran).
Izvedljivo je celo brez vrtenja rotorja — s statičnim uravnoteženjem na nožastih opornikih. Za natančen rezultat pa je priporočljivo dinamično uravnoteženje z merjenjem vibracij pri delovni hitrosti.
Momentna (parna) neuravnoteženost
Fizika
Momentna neuravnoteženost nastopi, ko glavna vztrajnostna os rotorja seka os vrtenja v težišču, a je glede nanjo nagnjena. Fizikalno to ustreza dvema enakima neuravnoteženima masama, postavljenima v različnih ravninah vzdolž rotorja in zamaknjenima za 180° po obodu.
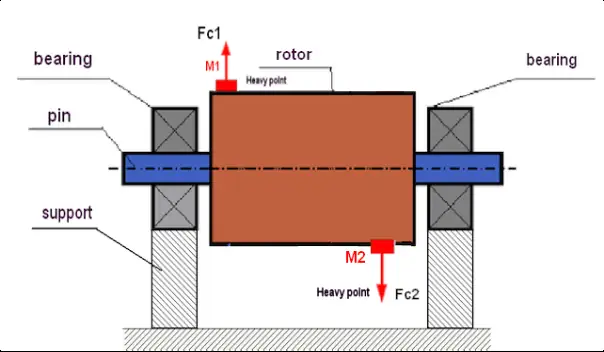
Sl. 2. Momentna neuravnoteženost: masi M1 in M2 ustvarita par centrifugalnih sil F1 in F2, ki povzročata „guganje“ ali „zibanje“ rotorja
Kako se kaže
V mirovanju (brez vrtenja) je tak rotor uravnotežen — na nožastih opornikih se ne bo poskušal ustaliti v nobenem določenem položaju. Statično uravnoteženje zato te težave ne odkrije.
Ko se vrti, pa par mas ustvari prevrnitveni moment, ki skuša rotor nagniti pravokotno na os vrtenja. To povzroči močne vibracije na podporah, pri čemer sta vibraciji na obeh podporah v protifazi (fazni zamik približno 180°).
Za katere rotorje je značilna
Momentna neuravnoteženost je značilna za dolge, vitke rotorje,kot so:
- dolge gredi brez diska v sredini,
- kardanske (pogonske) gredi,
- dolgi rotorji aksialnih ventilatorjev.
Metoda korekcije
Za kompenzacijo momentne neuravnoteženosti je treba korekcijske uteži namestiti v vsaj dveh korekcijskih ravninahin tako ustvariti kompenzacijski moment.
Dinamična neuravnoteženost (kombinirana)
Fizika
To je najbolj splošen in v praksi najpogostejši primer. Dinamična neuravnoteženost je kombinacija statične in momentne neuravnoteženosti.
Mehansko: glavna središčna vztrajnostna os rotorja ni niti vzporedna z osjo vrtenja niti je ne seka v težišču — temveč jo v prostoru prečka poševno.
Kako se kaže
Dinamična neuravnoteženost se kaže samo med vrtenjem. V mirovanju je morda opazna delna neuravnoteženost (če je prisotna statična komponenta), celotna slika pa je vidna šele med vrtenjem rotorja.
Za katere rotorje je značilna
Dinamična neuravnoteženost se pojavlja pri večini industrijskih rotorjev:
- lopatična kolesa centrifugalnih ventilatorjev,
- rotorji električnih motorjev in generatorjev,
- lopatična kolesa črpalk,
- rotorji drobilnikov in mlinov,
- mlatilni bobni kombajnov,
- vsak rotor z L/D > 0,5.
Metoda korekcije
Odprava dinamične neuravnoteženosti vedno zahteva uravnoteženje v vsaj dveh korekcijskih ravninah. To omogoča hkratno kompenzacijo silne (statične) in momentne (parne) komponente neuravnoteženosti.
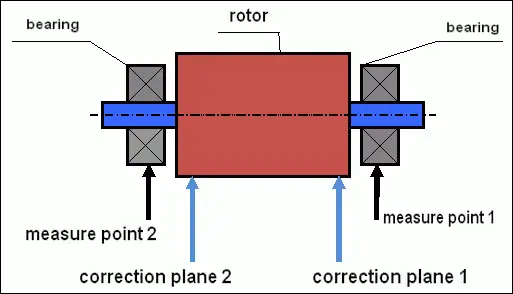
Sl. 3. Diagram dinamičnega uravnoteženja: za odpravo dinamične neuravnoteženosti se korekcijski uteži namestita v dveh ravninah, vibracijska senzorja pa na obeh podporah
Strokovno uravnoteženje rotorjev
Določimo vrsto neuravnoteženosti in uravnotežimo v eni ali dveh ravninah glede na zasnovo rotorja
Zahtevajte storitevHiter pregled: prepoznavanje vrste neuravnoteženosti
S to tabelo lahko hitro prepoznate verjetno vrsto neuravnoteženosti in potrebno število korekcijskih ravnin:
| Geometrija rotorja | Razmerje L/D | Verjetna vrsta neuravnoteženosti | Korekcijske ravnine | Primeri opreme |
|---|---|---|---|---|
| Ozek disk | L/D < 0,25 | Statična | 1 | Brusilne plošče, tanke jermenice, ozka lopatična kolesa |
| Disk srednje širine | 0,25 < L/D < 0,5 | Statična + delno momentna | 1-2 | Lopatična kolesa ventilatorjev, vztrajnostna kolesa |
| Širok disk ali kratka gred | L/D ≈ 0,5–1,0 | Dinamična | 2 | Rotorji električnih motorjev, široka lopatična kolesa, rotorji črpalk |
| Dolga gred | L/D > 1,0 | Dinamična (prevladuje momentna) | 2 | Kardanske gredi, gredi drobilnikov, rotorji mlinov, dolga vretena |
Praktična priporočila
Togi in gibljivi rotorji
Pomemben dodatek k razvrstitvi je razlikovanje med togimi in gibljivimi rotorji:
- Togi rotor: delovna hitrost vrtenja je precej nižja od prve kritične hitrosti. Rotor se pod centrifugalnimi silami komaj deformira. Za take rotorje zadostuje uravnoteženje v dveh ravninah. Večina industrijskih rotorjev je togih.
- Gibljivi rotor: deluje pri hitrosti vrtenja blizu kritične hitrosti ali nad njo. Elastični upogib gredi postane primerljiv z odmikom težišča. Uravnoteženje gibljivih rotorjev zahteva posebne metode in morda več kot dve korekcijski ravnini.
Kdaj je potrebna predhodna mehanska kontrola
Pred uravnoteženjem je priporočljivo preveriti:
- Radialno bitje: rotor ne sme imeti radialnega odstopanja
- Aksialno bitje: diski morajo biti pravokotni na os
- Nasedanje na gred: brez nesoosnosti pri namestitvi
Če ugotovite geometrijske napake, jih je treba najprej odpraviti, sicer uravnoteženje ne bo učinkovito.
Togi in gibljivi rotorji: ključna razlika
Eden temeljnih pojmov pri uravnoteženju je delitev rotorjev na toge in gibljive. Ta delitev določa tako možnost uspešnega uravnoteženja kot metodologijo, ki jo je treba uporabiti.
Togi rotor
Definicija: rotor velja za togega, če je njegova delovna hitrost vrtenja precej nižja od prve kritične hitrosti in se pod centrifugalnimi silami ne deformira (upogne) pomembneje.
Značilnosti:
- Delovna hitrost je navadno nižja od 70 % prve kritične hitrosti
- Upogib gredi pod centrifugalnimi silami je zanemarljiv
- Uravnoteženje v dveh korekcijskih ravninah navadno zadostuje
- Instrumenti, kot je Balanset-1A, so zasnovani prav za delo s togimi rotorji
Gibljivi rotor
Definicija: rotor velja za gibljivega, če deluje pri hitrosti vrtenja blizu ene od svojih kritičnih hitrosti ali nad njo. V tem primeru elastični upogib gredi postane primerljiv z odmikom težišča in sam bistveno prispeva k skupnim vibracijam.
Težava: poskus uravnoteženja gibljivega rotorja po metodologiji za toge rotorje (v dveh ravninah) se pogosto konča z neuspehom. Nameščene korekcijske uteži morda kompenzirajo vibracije pri nizki, podresonančni hitrosti, ko pa se doseže delovna hitrost in se rotor upogne, te iste uteži vibracije ojačajo, ker vzbudijo eno od oblik upogibnega nihanja.
Pomembno: to je eden ključnih razlogov, zakaj uravnoteženje „ne deluje“, čeprav so bili vsi postopki z instrumentom izvedeni pravilno. Pred začetkom dela je izjemno pomembno rotor razvrstiti tako, da njegovo delovno hitrost primerjate z znanimi (ali izračunanimi) kritičnimi hitrostmi.
Kako prepoznati vrsto rotorja
Praktična metoda:
- Ugotovite delovno hitrost vrtenja rotorja (vrt/min)
- Izvedite test pojemanja (merjenje vibracij med ustavljanjem rotorja po izklopu)
- Če so na grafu vibracij med ustavljanjem vidni izraziti vrhovi, gre za resonance (kritične hitrosti)
- Če je delovna hitrost blizu resonančnega vrha (±20 %), rotor deluje v nevarnem območju
Kaj storiti pri delovanju blizu resonance:
- Če se resonanci ni mogoče izogniti (npr. stroj deluje pri fiksni hitrosti, ki sovpada z resonanco), je med uravnoteženjem priporočljivo začasno spremeniti pogoje vpetja enote
- Na primer, zmanjšajte togost podpor ali namestite začasne elastične podloge, da premaknete resonanco
- Ko je neuravnoteženost rotorja odpravljena in so vibracije normalizirane, lahko stroj vrnete v običajne pogoje vpetja
Zaključek
Pravilna prepoznava vrste neuravnoteženosti je prvi korak k uspešnemu uravnoteženju. Poznavanje geometrije rotorja (razmerja L/D) vam omogoča, da vnaprej predvidite prevladujočo vrsto neuravnoteženosti in izberete najboljšo strategijo.
Ključne ugotovitve:
- Ozki diski (L/D < 0,25) — statična neuravnoteženost, ena ravnina zadostuje
- Večina industrijskih rotorjev (L/D > 0,5) — dinamična neuravnoteženost, potrebni sta dve ravnini
- Če uravnoteženje v eni ravnini poslabša vibracije na drugi podpori, preklopite na uravnoteženje v dveh ravninah
- Pred uravnoteženjem vedno preverite geometrijo rotorja
Sodobni dvokanalni instrumenti, kot je Balanset-1A, omogočajo uravnoteženje v eni in dveh ravninah ter samodejno izračunajo potrebne korekcijske uteži.
Uravnoteženje rotorjev
Instrumenti in storitve za uravnoteženje v eni in dveh ravninah
Instrument Balanset-1A
Dvokanalni instrument za uravnoteženje togih in gibljivih rotorjev
Kupi instrumentStoritve uravnoteženja
Uravnoteženje rotorjev z upoštevanjem vrste neuravnoteženosti
Naroči storitevHiter kontrolni seznam
- Izmerite razmerje med dolžino in premerom (L/D) rotorja
- Pred uravnoteženjem preverite radialno in aksialno bitje
- Preverite nasedanje rotorja na gred
- Za ozke diske uporabite eno ravnino, za L/D nad 0,5 dve ravnini
- Preklopite na dve ravnini, če se stanje na drugi podpori poslabša
- Primerjajte delovno hitrost s kritično hitrostjo